(特集) 車載LiDARの技術動向 ~種類・方式の特徴と全体像~

自動運転・ADASにおけるコア技術として、車の目としてLiDAR(Light Detection and Ranging)が大注目されている。テスラのようにLiDARを不要とするメーカーもいるが、今年のCES2021でモービルアイもLiDARに参入することを表明したように、依然としてLiDARは自動運転を実現するのに重要視されている。
現在、LiDARは様々な企業によって技術開発されており、それぞれの方式によって長所・短所がある。今回は、LiDARにおける主要な種類・技術方式についてできる限り包括的に整理することを試みている。
注)製品のスペックなどはあくまで公開されている情報に基づき整理をしています。
LiDARの種類の全体像
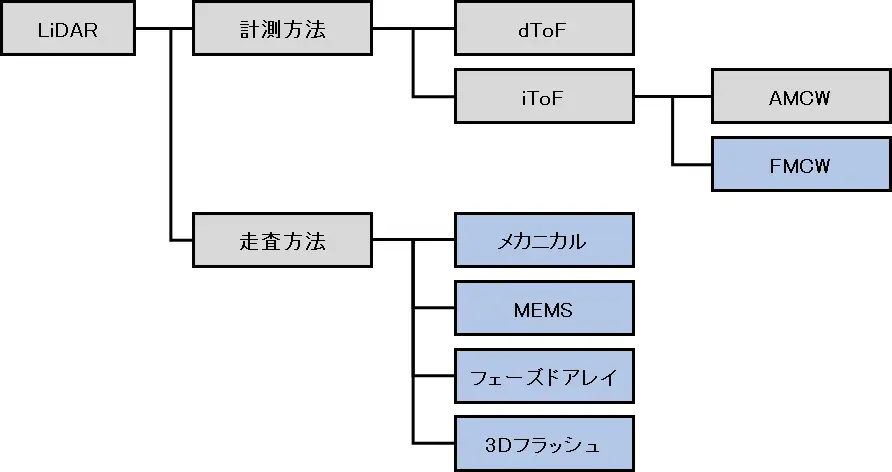
主流のdToF(Direct ToF)から発展しているLiDARであるが、大まかにはその計測方式と走査方法という二つの要素によって分類されることができる。現在の多くの自動車用LiDARはメカニカル方式のdToFとなっており、光を照射してその反射までの時間から対象物までの距離を求める。そして、対象物の認識を行うには、レーザー光を水平・垂直方向へ照射し、ポイントクラウドという点群にして物体形状を把握する。
LiDAR技術分類の全体像
LiDARの計測方法 ~ToFを理解する~
パルス光の送受信時間から距離を求めるdToF
LiDARは通常、レーザー発信モジュール、受光モジュール、レンズ、信号処理基板、走査機構(ただし走査機構が無いものも最近出てきている)によって構成され、物体までの距離を検知することができる。その計算はレーザー光をパルス状に照射し、対象物に光が反射して、その反射光を受信モジュールで検知することで、空気中の光の速度は一定であることから、発射から受信までの時間から距離を計算する。この方法は、直接的に時間を計測することから、dToF(Direct Time of Flight)と言われ、現在のLiDARで広く使われている。
反射光の位相のズレから距離を求めるiToF
一方で、iToF(Indirect Time of Flight)という方式も存在する。これは、dToFがパルス状のレーザーを照射して光の送受信の時間から距離を算出しているのに対し、iToFは周期的なレーザー光(連続波)を照射し、物体までの距離に応じた反射光の位相のズレから、その距離を計算する。
FMCW(周波数変調連続波)やAMCW(振幅変調連続波)が、この方式に該当している。特にFMCWは元々ミリ波レーダーで使われていたが、近年、レーザー光へ適用が模索されており、同方式については後述する。
一般的にiToFは直接ToFに比べて多画素化しやすく、測距分解能が高めやすい利点があり(※1)短距離や中距離用途に強いと言われる。
LiDARの主要な種類
従来主流の「メカニカルLiDAR」
元々は2000年代に米国防省高等研究計画局DARPAアーバンチャレンジのプログラムで、Velodyneのメカニカル方式のLiDARが自動運転車両に使われたことが、LiDARが自動運転分野で注目された出発点となっている。それ以来、長くLiDARではこのメカニカルLiDARが使われてきた。
例えばVelodyneの長距離LiDARであるAlpha PrimeはLiDAR本体そのものをモーターで360°回転させるスキャン方式であり、水平FOV360°、垂直FOVで40°となっており、非常に広い視野角かつ、220mの長距離検出性能を実現している。
現在も自動運転車ではメインで使われているため、性能的には問題ないが、コスト面が課題であるのは周知の通りだ。Velodyneの中距離用LiDAR PUCK(検出距離100m)で、2018年当時で4,000ドル(※2)と言われており、長距離用は更に高価となり、例えば中国系Robosenseの長距離用LiDARのRS-LiDAR-32はこのサイトによると約250万円である。
つまり、以前は75,000ドルとも言われたLiDARであるが、長距離用を搭載するとなると未だに数百万円レンジとなっており、自動運転で実用化が求められている高速道路での自動運転走行に必要な、長距離性能を満たす安いLiDARが求められている。
メカニカルLiDARのスペック例
| 企業名 | Velodyne | Velodyne | Robosense | Hesai |
| 製品名 | Alpha Prime | Ultra Puck | RS-Ruby | Pandra64 |
| 生産開始時期 | 販売中 | 販売中 | 販売中 | 販売中 |
| Channel | 128 | 32 | 128 | 64 |
| 最大検出距離注1 | 220m | 120m | 200m | 200m |
| FOV | 360°×40° | 360°×40° | 360°×40° | 360°×40° |
| 角度分解能(H*V) | 0.2°×0.1° | 0.33°注2 | 0.2°/0.4°× 0.1° | 0.2°×0.167° |
| レーザー波長 | 905nm | 905nm | 905nm | 905nm |
| pts/s 注4 | ~2,400,000 | ~600,000 | ~2,304,000 | ~1,152,000 |
注1 反射率10%時
注2 Verticalの分解能を示す、Horizonは0.1~0.4°、何も記載が無ければH×V
注3 Horizonの分解能を示す
注4 Single Returnのみ掲載
注5 各社を比較する意図ではなく、あくまでスペック例を参考とするために挙げている(厳密に比較するには同じチャンネル数のものなどで比較が必要なため)
短中距離用でのサンプル出荷が始まる「MEMS LiDAR」
機構部分にMEMS(微小電子機械システム)を使用したものであり、走査のための機構部にモーターを利用しなくても良くなるため、コスト低減を実現できるとして、もう何年も次世代のLiDARとして期待されているタイプ。現在、多くのベンチャー企業や大手企業が開発を進めており、近年はようやく市場にも出つつある。
mmレベルのミラーを備えたシリコンデバイスで構成されており、ミラーの微小駆動によってレーザー光に振れ角を持たせ、扇形のスキャンを可能にする。よく、ソリッドステートLiDARの1種として分類されるが、厳密には可動部が完全に無いわけではなく、可動部を最小限に抑えたものとなっている。
特徴としては、従来のメカニカル方式に対して、LiDARスキャナーのサイズと重量を大幅に削減でき、また低コスト化も図れることである。一方で欠点としては、MEMSミラーでは振れ幅の関係から、FOVは従来より狭くなることとなっており、360°をカバーするのであれば、例えば4台など複数を利用する必要がある。
今年のCES2021で発表されたLiDARにおいても、Blickfeldが水平FOV107°で最大150mの検出距離のMEMS LiDARを出展していたり、RobosenseのMEMSソリッドステートLiDARの量産モデルM1は最大150m(反射率10%)の検出距離で、FOV120°×25°、単体での価格でおおよそ100万円程度となっている。おおよそ現行のMEMSソリッドステートLiDARは、100~200m(反射率10%)で、広角のもので水平FOV100~120°程度の視野角であるようだ。
車載向けにおいてはまだサンプル出荷段階であることも多く、今後の生産開始が待たれるが、現状で最も実用化に近く、具体的なスペックの数字が出てきている方式となっている。
MEMS LiDARのスペック例
| 企業名 | Robosense | AEye | Innoviz | Innoviz |
| 製品名 | M1 | 4SightM | InnovizOne | InnovizTwo |
| 生産開始時期 | 販売中 | サンプル出荷中 | 2021年内 | 2022-23年 |
| Channel | N.A. | N.A. | N.A. | N.A. |
| 最大検出距離注1 | 150m | 205m | 250m | 300m |
| FOV注2 | 120°×25° | 60°×30° | 115°x25° | 125°×40° |
| 角度分解能(H*V) | 0.2°×0.2° | 0.1°×0.1° | 0.1°×0.1° | 0.07°×0.05° |
| レーザー波長 | 905nm | 1,550nm | 905nm | 905nm |
| pts/s | N.A. | N.A. | N.A. | N.A. |
注1 AEyeは反射率10%時だが同社公開の資料によっても数値はバラつきあり、Innovizも前提反射率は不明
注2 何も記載が無ければH×V
注3 各社を比較する意図ではなく、あくまでスペック例を参考とするために挙げている(厳密に比較するには同じチャンネル数のものなどで比較が必要なため)
※InnovizTwoの更新されたスペックが発表されていたため、表でも更新しています。
長距離でのブレークスルーが期待される「FMCW LiDAR」
FMCW(周波数変調方式)は、従来から車載においてはミリ波レーダーで使われてきた測定手法である。時間の経過に応じて周波数が直線的に上昇するように変調を行った電波を連続的に照射し、送信波と反射波の周波数差から距離を求める。
FMCWの長所は、ToFに比べて感度を高くすることができ高解像度を実現しやすいこと、LiDARの他の反射波の干渉や、雨や霧といった影響も受けにくいことである。また、この方法ではドップラーシフトから対象物の瞬間速度も割り出すことができる。そのため、4D LiDARという表現がされる。なお、下記のスペック例の表を見てもらうとわかるが、FMCWによって実現できるとされている角度分解能は0.1°未満となっており、高解像度が特徴であるというのが数字からもうかがえる。
一方でToFに比べると高い演算能力が求められること、そして長距離での安定性能を実現するにはコヒーレンス長を実現するチューナブルレーザーが求められ、システムが複雑になる可能性が指摘されている(※3, 4)。
現在、この方式に取り組む企業は複数存在し、代表的なところではデンソーが1月に提携を発表したAeva(ZFもAevaと提携してFMCW LiDARの量産化を目指している)や、自動運転スタートアップのAuroraが買収したBlackmoreもFMCW方式でのLiDARを開発している。
Aevaは2023年度第4四半期頃を生産開始のターゲットとする同社のFMCW LiDARの価格を500$未満をターゲットにしていると発表もしており、MEMS等で期待されている数百ドルレベルの価格感を実現することが狙われている。
FMCW LiDARのスペック例
| 項目 | Aeva | Insight LiDAR |
| 製品名 | Aeries | N.A. |
| 生産開始時期 | 2023年Q4 | 不明 |
| Channel | N.A. | N.A. |
| 最大検出距離注1 | 250m | 200m |
| FOV注2 | 120°×30° | 120°×340°注3 |
| 角度分解能(H*V) | 0.05°×0.05° | 0.025°×0.025° |
| レーザー波長 | N.A. | N.A. |
| pts/s | N.A. | N.A. |
注1 反射率10%時
注2 何も記載が無ければH×V
注3 Insight LiDARの公表数値では水平か垂直か不明であった
注4 各社を比較する意図ではなく、あくまでスペック例を参考とするために挙げている(厳密に比較するには同じチャンネル数のものなどで比較が必要なため)
関連記事はこちらも参考:
デンソーとAevaが次世代LiDARの開発で提携
SPAC上場を予定している4D LiDARを開発するAevaが上場前に200m$の資金を調達
産業用途から実用化を始めた「フェーズドアレイLiDAR」
光フェーズドアレイ(Optical Phased Array:OPA)は、光の回折・干渉に基づいて光ビームの断面形状や進行方向を制御するデバイス(※5)であり、ビーム配向を制御して光を照射するもの。
海外においてはDARPAが実用化のための研究プロジェクトを立ち上げ、そこで開発された技術がLiDARベンチャーであるQuanergyでも活用されている。このQuanergyの技術の詳細は不明であるが、同社の特許によると、光フェーズドアレイ集積回路を使ってビームを制御する機構を有し、検出器はアレイ状になっており、光感知ピクセルは、単一光子アバランシェダイオード(SPAD)にすることもできるという。
このQuanergyのフェーズドアレイLiDARは、可動部無しの超小型デバイスであることが特徴となっており、微細スケールでも可動部が無いことから、振動に強く、100,000時間以上の平均故障間隔であるという。またOPAはCMOSシリコンプロセスに基づいており、スケーラブルで大量生産時に大幅な低コスト化が可能である点も特徴となっている。
一方で、この方式の課題は回路内部で失われる光の損失(挿入損失)とも言われ(※6)、特に自動運転用途などで、長距離・高出力にしようとすると、その損失は大きくなるようだ。
そこで、現時点では自動運転向けというよりはQuanergyもセキュリティや産業オートメーション向けを強調している。Quanergyが発表をしているOPAソリッドステートLiDARのS3-2を見てみると、ロングレンジタイプのものでも10%の反射率で検出距離は20mとなっている。まずは同社のメカニカル方式ですでに売上を上げている、産業用途やスマートシティなどの、短・中距離の用途からOPAの実用化を試みているようだ。
ちなみに、このQuanergyは2021年6月にSPACでニューヨーク証券取引所へ上場することを表明した。
参考:光フェーズドアレイ方式LiDARのQuanergyがSPACで上場
また、Velodyneが昨年発表したVelarray H800では、FOVが120°×16°で、最大200mの検出性能となっており、量産時のターゲット価格は500$であることが発表されている。このデバイスは2021年後半に生産を開始する計画であるようだ。
補足) Velodyneが発表したVelarray H800は技術の詳細については公開されておらず、厳密には光フェーズドアレイ方式かどうかは不明。同社は「独自の特許を取得したMicro Lidar Array(MLA)技術を使っている」としている。なお、特許上にこのMLAの直接的な記述はないが、近年出願されている複数の特許で、光位相変調デバイスで光の方向を制御するフェーズドアレイ技術を使ったLiDARの特許が確認でき、一旦このOPAに含めている。
iPhoneでも採用された「3DフラッシュLiDAR」
MEMS LiDARは走査型であるのに対して、3DフラッシュLiDARは非走査型として分類できる。この方式は、デジタル撮像のように2次元アレイ状のレーザーを拡散照射することによって3Dイメージを撮像するものとなっている。フラッシュ型は時刻ずれが無い3Dイメージを得ることができ、広範囲に照射するためモーターも不要にした非走査型にできるため、コンパクトで低コスト化を実現することが期待できる(※7)。
このフラッシュLiDARはまだ研究開発中のものが多いが、中でもSPAC上場を狙っているOusterはレーザーを発射するための垂直共振器面発光レーザー(VCSEL)チップと、反射したレーザーを検出するためのフォトンアバランシェダイオード(SPAD)チップを組み合わせ、1,550nmの光源を使ったマルチビームフラッシュライダーを開発している。そして、このVCSEL×SPADの方式はiPhone 12 ProやiPad Proでも採用されているものである(※8, 9)。
一方で、この方式の課題は面で光源を照射するため、検出距離やFOVはスキャンLiDARよりも低くなること(ただしFOVはMEMS方式よりは広角になると想定される)一般的には言われているが、Ouster等のプレーヤーがこうした課題をどのように克服するのか要注目である。
3DフラッシュLiDARのスペック例
| 企業名 | Ouster | Leddar Tech |
| 製品名 | ES2 | Leddar Pixell |
| 生産開始時期 | 2024年生産開始 (2022年サンプル出荷) | 販売中 |
| Channel | N.A. | N.A. |
| 最大検出距離注1 | 200mターゲット | 20m |
| FOV | N.A. | 177.5°×16° |
| 角度分解能(H×V) | N.A. | N.A. |
| レーザー波長 | N.A. | 905nm |
| pts/s | N.A. | N.A. |
注1 反射率10%時
注2 何も記載が無ければH×V
注3 各社を比較する意図ではなく、あくまでスペック例を参考とするために挙げている(厳密に比較するには同じチャンネル数のものなどで比較が必要なため)
(修正)Ousterのレーザー波長を1,550nmと記載しておりましたが、こちら誤りでしたので修正させていただきました。大変失礼いたしました。同社はOSシリーズでは850nmの波長を使っているのですが、開発中のES2でも850nmを使っているかは明かしていないため、N.A.とさせていただきました。
関連記事はこちらも参考:
3DフラッシュLiDARのOusterもSPAC上場へ
Ousterが3Dフラッシュ方式の新しい高性能ソリッドステートLiDARを発表
その他:独自スキャン方式の「非反復走査式LiDAR」
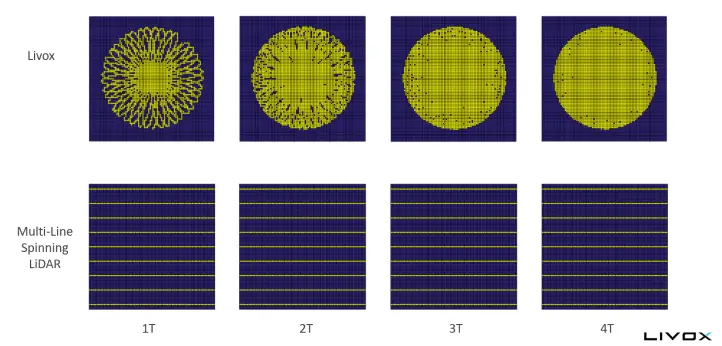
従来のメカニカル方式のLiDARでは、水平方向に平行してレーザー光を走査し、対象物のスキャンを行う。一方で、中国のドローンメーカーDJIの子会社のLivoxが開発したのは、非反復走査式と呼ばれる方法だ。プリズム方式と言っても良いかもしれない。
注1)厳密には反復はしているので、非水平反復という方が正確なように思える
このLivoxのLiDARは、浜松ホトニクスがこの用途のために開発をした6つのカスタムフォトダイオードダイと、6つのアバランチフォトダイオードによって構成される3つの回転プリズムによって立体的に走査を行う。同社によると、通常の水平方向の走査では、線と線の間がセンシングされないままとなり、それを埋めるためにデータ演算が膨大となる。同社の方式であれば、一気に同じ領域内を走査するため、計測する時間が増えるにつれて描写密度が高くなるという(積分時間が増加するとFOVカバー率が増える)。こちらのデータによると、Horizonで、おおよそ0.65秒で100%となっている。なお、光源の波長帯は905nmとなっている。短・中距離での長い積分時間が取れる用途においては、優れた点群密度とコストパフォーマンスを実現することができる。
Livoxによると、自動運転レベル3・レベル4用に設計された高性能LiDARのHORIZONで99,000円と、低コストでかつ最大260mにもなる長距離検出範囲を実現。ただし、これはよく見ると、反射率80%の場合であり、実際に各社のスペックを横比較する際には、反射率10%を使うことがほとんどのため、反射率10%においては90mとなる。そのため、現行技術では基本的には短・中距離用と見る方が良いように見える。
関連記事はこちらも参考:
中国の新興EVメーカーのXpengがLivoxのLiDARを2021年生産モデルへ採用
LiDARの種類別の整理(メーカー含む)
ここまで大まかにLiDARの種類別の特徴について触れてきたが、整理すると以下のような表になると考えられる。ただし、LiDARのスペックにおいては現在開発中のものも多く、厳密な評価は難しい。今後発表される情報によって評価は変わる可能性もある。あくまで参考として捉えていただきたい。
LiDAR技術方式別の整理
| 項目/種類 | MEMS | FMCW | OPA | フラッシュ | 非反復走査 |
| 企業例 | Innoviz, AEye, Robosense他多数 | Aeva, Aurora(Blackmore), Insight LiDAR | Quanergy, Velodyne | Leddar Tech, Ouster, Sense Photonics | Livox |
| 可動部 | あり(極小) | あり/なし | なし | なし | あり |
| 小型・軽量化 | 〇 | 〇 | 〇 | 〇 | - |
| 広角 | △ | △ | ×~△ | △ | △ |
| 高精細 | - | 〇 | - | - | 〇 |
| 検出距離 | 〇 | 〇 | × | △~? | △ |
| ターゲット価格例 | 数百$レベル | 500$未満 | N.A. | 量産開始時600$ | 現行 940$ |
その他LiDAR関連の記事はこちら:
【CES2021】自動運転・ADASのコア技術となるLiDARの海外ベンチャーまとめ
自動運転・ADASに重要なLiDARの海外スタートアップにおける出資・提携関係(2021年1月版)
【世界のLiDARベンチャーを調査したい方】
FMCWやMEMS、オプティカルフェーズドアレイなど、技術方式や用途の情報も含めた世界のLiDARベンチャーロングリスト調査に興味がある方はこちら
グローバル技術動向調査:詳細へ
参考文献:
※1 ソニー「世界最高水準」ToFセンサー発表、次の稼ぎ頭に巻き返し, 日経XTECH
※2 Self-driving tech supplier Velodyne cuts price of key sensor in half, Deroit Free Press
※3 FMCWライダ:自動運転車の選択肢, 2019 (Laser Focus World Japan)
※4 自動運転車市場向けのフォトニクスガイド, 2018(Laser Focus World Japan)
※5 電気光学ポリマーを用いた4μmピッチ光フェーズドアレイによる偏光動作, 映像情報メディア学会誌 Vol.73, No2
※6 3Dイメージを撮影するフラッシュライダー, 宇宙科学研究所
※7 An overview of imaging lidar sensors for autonomous vehicles, Peer-reviewed version available at Appl. Sci. 2019, 9, 4093; doi:10.3390/app9194093
※8 A rising star in the LiDAR landscape – An interview with Ouster
※9 新型iPad ProのLiDAR部を分析 ソニーの新型センサーを活用, 日経エレクトロニクス
※10 The iPhone 12 - LiDAR At Your Fingertips, Forbes
※11 自動運転のためのセンサシステム入門, 伊東敏夫, 日刊工業新聞社
※12 長距離で高い測距精度を有するTOF方式長距離画像センサを開発, パナソニック

関連記事
-
特集記事
固体酸化物形電解セル=SOECとは?技術的内容と各社の開発・商用化動向
-

ニュース記事
「酵素×AI」でプラスチックリサイクル技術を開発する英Epoch BiodesignがシリーズAで27億円調達。施設建設に資金を活用
-

ニュース記事
米Ataraxis AIがシリーズAで30億円を確保。がんの「予後」までをケアするAIモデル開発
-
ニュース記事
磁場閉じ込め方式核融合開発のRenaissance Fusionが51億円を調達。シリーズA最初のクローズ、メガバンク系ファンドが主導
-

ニュース記事
AIマッサージ開発の米Aescapeが125億円を調達。投資家にはNBA選手も
-

特集記事
軸発電の仕組みと開発する3社|カーボンニュートラルで求められる船舶の発電方法
CONTACT
お問い合わせ・ご相談はこちら

